PC机程序采用图形化编程语言LabVIEW编写,LabV I EW提供5个串口通信节点,分别实现串口初始设置、串口写、串口读、检测串口输入缓存中的字节数、串口中断。在PC机和无线采集模块串行通信前,首先要配置好串口,即串口初始化,使计算机串口的各参数设置与无线收发模块的串口参数一致。
(1)VISA Configure Serial Port.vi:利用该节点可以设置串口波特率、数据位、停止位、奇偶校验、缓存大小以及流量控制等参数。
(2)VISA Write:完成输入有计算机发往数据采集板的采集、停止、前后左右运行、左自旋,右自旋,6挡速度、自动巡航等一系列命令。
(3)VISA Read:用于从串口缓存中读出指定长度的数据。
(4)VISA Close:关闭一个已经打开的串口,从而释放LabVIEW对这个串口资源的占用。
(5)Simple Error Handler.VI:简易错误处理器,显示错误输入并处理。
LabVIEW中提供键盘、鼠标、操作手柄信息采集的函数库Input Device Control,通过Acquire Input Data.vi可以获取键盘、鼠标和操作手柄的当前状态。
操作人员通过键盘、鼠标、操作手柄等方式输入的运行指令转换为移动机器人的运行指令。在利用Acquire Input Data.vi获取手柄原始输入信息后,用Unbundle By Name函数提取所需轴和按键的数值,用Bundle、Cluster To Array、Boolean Array To Number等函数将输入信息转换为指令解析程序所需数值类型。在轮式移动模式中Y axis数值控制机器人运行速度,X axis rotation轴数值控制机器人转向;在腿式或复合模式运行状态下,可通过数字键输入改变机器人的运行模式。
当程序开始运行后先打开接收数据按钮,然后打开串口,就可以显示出采集来的数据。同时可以从运行的界面看到数据的历史曲线,图表曲线右端为当前加速度,即可以从曲线上看出又可以从数字控件中看到确切的数据。运行时的界面如图5所示。当点击各节点按钮时可分别查看其加速度度变化情况。
利用以上方法在Labview平台上建立移动三轮机器人小车的人机交互系统,通过此系统操作人员可方便直观的观测到机器人的运动信息,并通过界面实现对机器人的控制操作。图5为机器人小车发生碰撞时显示在Labview图表上的加速度曲线。
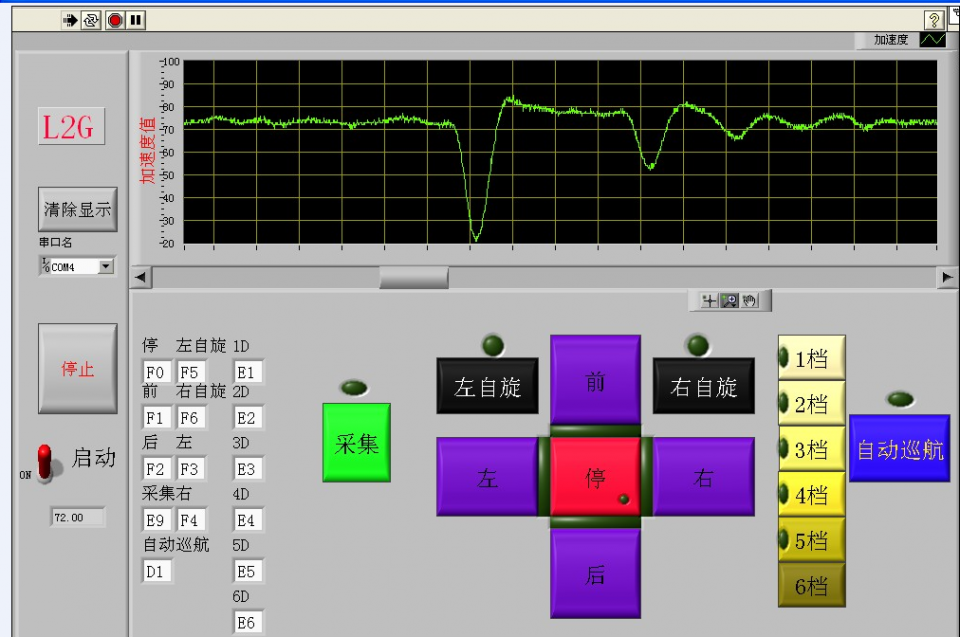
图5 小车碰撞时的加速度曲线














