科研项目:
*中国大洋矿产资源研究开发“十五”深海资源研究开发专项《深海采矿系统监控、动力配置技术设计》研究开发子项目。
局部剪切阶段(开始塑性变形):当履带对海泥的压载大于临界荷载而小于海泥的极限承载力时,海泥出现塑性变形,随着压力的增大,塑性变形区逐渐扩大。如图1示,a点与b点之间。
完全破坏阶段(塑性变形区连成连续的滑动面):当压力继续增大,超过海泥的极限承载力,塑性变形区连成连续的滑动面,海泥被挤出来。如图1示,超过“b”点后,应力增加一微小量,应变便显著增加。这种显著增加的应变,构成塑性流动。塑性流动以前的状态,通常称为塑性平衡状态。从塑性平衡状态转变为塑性流动状态,表示物质被破坏。
由以上分析可知,深海机器人应该工作在局部剪切阶段才能较好的利用海泥提供的牵引力行走。
(2)履带-海泥相互作用
当驱动履带,在接触面的地面上产生剪切作用。如图2所示,为了预测车辆的牵引力和滑转率,需要了解地面的剪切应力和剪切变形之间的关系。这个关系可由剪切试验来确定。在剪切试验中可用剪切板代替履带刺的剪切作用。
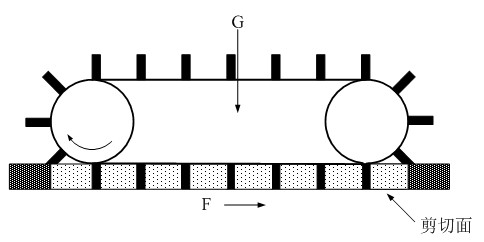
图2 履带的剪切作用
经测定我国矿区内的海泥剪切特性存在明显大于0的残余剪切力。Wong提出以下公式来表示改型土壤:
 (1)
(1)式中,k-水平剪切变形模数,m;j-剪切位移,m。Kr-残余剪切应力与最大剪切应力比τr/τmax。














