中南大学信息科学与工程学院 于欣 王随平 张佳洁
摘 要:通过深入分析海底泥土力学特性,根据机器人本身的结构特点和物理学原理,在进行有利于简化问题分析与研究的假设后,建立深海作业机器人的动力学模型和液压驱动系统模型。分析了履带防滑控制原理,揭示了滑转率与附着条件的关系,综合深海作业机器人模型建立了以滑转率控制为目标的防滑控制系统。利用趋近律方法削弱滑模变结构控制固有的抖振现象。应用基于附着系数和滑转率曲线形状的辨识方法可以通过马达转矩和履带角加速度得到最佳滑转率值。通过仿真结果表明,控制系统能够根据不同的海底行走情况预测最佳滑转率并将实际滑转率控制在最佳值附近,同时驱动力矩的变化也比较平稳,能够保证深海机器人行走过程的安全性要求。
关键词:深海作业机器人 防滑控制 滑模变结构 滑转率
1引言
深海作业机器人是一种在水深5000~6000米的海底沉积物上行走、采集锰结核的智能履带车辆,两条履带由安装在后轮上的两台液压马达分别驱动,用变量泵调节速度。我国采矿区位于太平洋中部,为典型的深海平原,其上覆盖着很厚的淤泥及沉积物[1]。海底沉积物不同于陆地底质,剪切强度较低,具有搅动流体特性、塑性特性。如果深海作业机器人的行驶驱动力与沉积物特性不匹配,将出现履带过度打滑现象。为保证深海作业机器人的安全行走,应使行走驱动力适合沉积物特性的变化。基于上述问题,深海履带式作业机器人行走防滑控制技术的研究开发,将提升深海采矿系统安全作业水平。
国外机器人行走防滑技术的相关研究,Daegun Hong和Paljoo Yoon[2]提出了一种基于制动观测器的防滑控制系统。制动观测器负责评估车轮制动力,侧滑力和摩擦系数的变化。国内相关研究,刘志新、张大卫、李幼德[3]建立了四轮驱动汽车加速过程的数学模型,以滑转率为调节对象,提出一种基于模糊PID控制的驱动防滑控制ASR算法。目前国内外对履带车辆防滑控制相关技术尚处于起步阶段,对复杂地形下的深海作业机器人,势必要求人们对机器人与地面相互作用特性,行驶底质识别以及防滑控制做更深入的研究,也必将促进人们对这些问题的认识。
本文根据深海作业机器人行走的特点和海底环境的特点,建立了深海作业机器人的力学模型,并根据机器人驱动系统的结构和特点建立了液压系统模型,设计了机器人防滑控制系统,并提出最佳滑转率的辨识方法。基于MATLAB仿真平台,对整个深海作业机器人防滑控制系统进行仿真。[1]
2 深海作业机器人工作环境特性研究
(1)海泥土力学特性
深海作业机器人履带与海泥的作用十分复杂,图1为典型的海泥沉积物变形过程示意图,s为海泥应变,p为海泥所受压力。海泥受压时的破坏可分为三个过程[4]:
直线变形阶段(压密阶段):当履带对海泥的压载小于临界荷载时,海泥被压紧,地面能够表现为弹性状态。如图1示,a点之前。
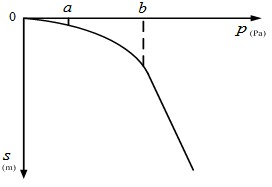
图1 海泥变形过程示意图














